- Description:
- SoftwareNegLimitTriggerValueSet sets the Software Negative Position limit value.
- Parameters
-
| triggerValue | The limit position, in units. |
Part of the Limits and Action Configuration method group.
- Sample Code:
- Axis: Configuration
axis = controller.
AxisGet(axisNumber);
const double positionToleranceMax = Double.MaxValue / 10.0;
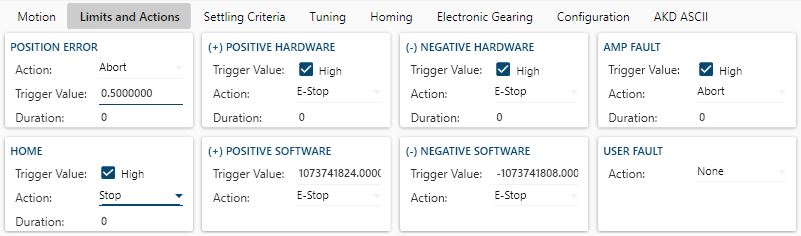
- RapidSetup:
- Go to axis screen->Limits & Actions. In the image below, SoftwareNegLimitTriggerValueSet sets the value in the Trigger value box shown in the Negative (-) Software box. It currently triggers at -1125899890065410.
- See also
- SoftwareNegLimitTriggerValueGet