RMP Motion Controller
10.5.2
The RMP Motion Controller APIs
MotionController
NetworkNode
Axis
MultiAxis
IOPoint
Cartesian
RsiError
Contact
Support
RMP
◆
HardwarePosLimitDurationGet()
double HardwarePosLimitDurationGet
(
)
Description:
HardwarePosLimitDurationGet returns the duration required before the Hardware Positive Limit event triggers.
Returns
(double) In seconds.
Remarks
This function is also available in
RapidSequencer
.
Part of the
Limits and Action Configuration
method group.
Sample Code:
Axis: Configuration
const
bool
ACTIVE_HIGH =
true
;
// Constant for active high.
const
bool
ACTIVE_LOW =
false
;
// Constant for active low.
const
double
HW_POS_DURATION_TIME = 0.01;
// Positive limit duration. (in seconds)
const
double
HW_NEG_DURATION_TIME = 0.01;
// Negative limit duration. (in seconds)
// SET (Hardware POSITIVE (+) Limit characteristics)
axis.
HardwarePosLimitActionSet
(
RSIAction
.RSIActionE_STOP);
// Set the positive limit action to E_STOP.
axis.
HardwarePosLimitTriggerStateSet
(ACTIVE_HIGH);
// Set the positive limit trigger state to ACTIVE_HIGH.
axis.
HardwarePosLimitDurationSet
(HW_POS_DURATION_TIME);
// Set the positive limit duration to 0.01 seconds.
// GET
var hPosLimAct = axis.
HardwarePosLimitActionGet
();
var hPosLimTrigState = axis.
HardwarePosLimitTriggerStateGet
();
var hPosLimDur = axis.
HardwarePosLimitDurationGet
();
// SET (Hardware NEGATIVE (-) Limit charateristics)
axis.
HardwareNegLimitActionSet
(
RSIAction
.RSIActionE_STOP);
// Set the negative limit action to E_STOP.
axis.
HardwareNegLimitTriggerStateSet
(ACTIVE_LOW);
// Set the negative limit trigger state to ACTIVE_LOW.
axis.
HardwareNegLimitDurationSet
(HW_NEG_DURATION_TIME);
// Set the negative limit duration to 0.01 seconds.
// GET
var hNegLimAct = axis.
HardwareNegLimitActionGet
();
var hNegLimTrigState = axis.
HardwareNegLimitTriggerStateGet
();
var hNegLimDur = axis.
HardwareNegLimitDurationGet
();
RapidSetup:
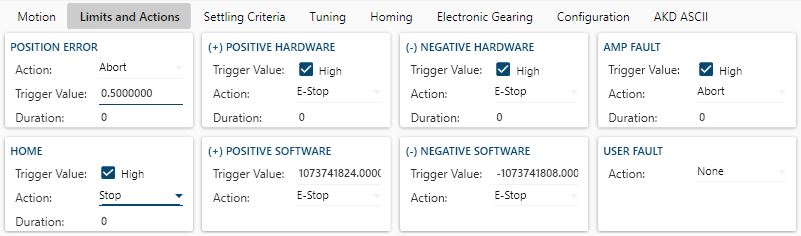
Go to axis screen->Limits & Actions. In the image below, HardwarePosLimitDurationGet returns the value in the "Duration" box in the Positive (+) Hardware box. It is currently 0.
See also
HardwarePosLimitDurationSet
Examples
HardwareLimits.cpp
.
RSI
RapidCode
Axis
Generated by
1.10.0