| MotionController | Axis | MultiAxis | IO | IOPoint | NetworkNode | RsiError | Sample Apps | Changelog |
RapidCode API |
|
|
pure virtual |
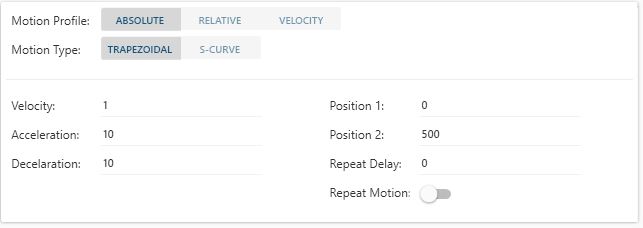
Command a relative point-to-point S-Curve motion.
| relativePosition | A relative increment, positive or negative. |
| vel | Maximum velocity, units/second. |
| accel | Maximum accleration , units/second/second. |
| decel | Maximum deceleration , units/second/second. |
| jerkPct | Jerk Percent, which defines the percentage of acceleration time which is smoothed, 0.0 to 100.0 . |