FilterGainTableSet sets the gain table to be used by an axis. Gain tables are very useful if you want to set different filter coefficents (example: Ki, Kp, Kd, etc) all at once instead of setting various filter coefficients individually using FilterCoeffSet() \ For example, if you have a vertical axis that requires different filter coefficient when moving in the positive direction versus the negative direction (due to gravity). All you would need to do is use gain table 0 for positive direction, and then switch to gain table 1 for negative direction. You can use up to 5 gain tables per axis.
Notes:
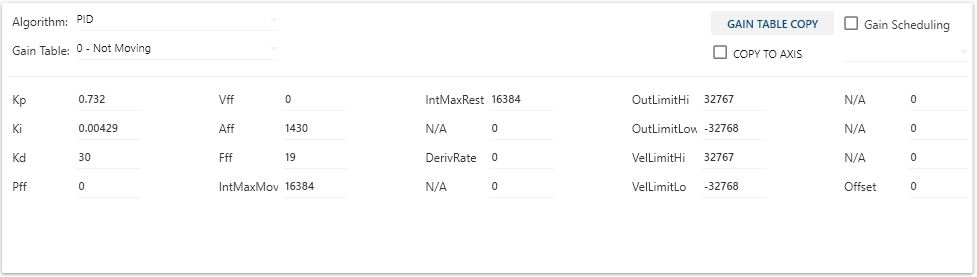
If you would like to set different gain tables for different areas of your motion profile such as acceleration, deceleration, constant velocity, and no motion, you should look into GainScheduling.