- Description:
- EStop will declerate an axis to a stop in the time specified by EStopTimeSet().
After EStop(), axis will be left in error state (see RSIStateError) & drive(also called amplifier) is still enabled
- Warning
- The EStopping time that is used will be from the object (Axis or MultiAxis) that started the active motion, NOT the object that commanded this action.
-
If a MultiAxis motion is in progress, the EStop time will be determined by MultiAxis::EStopTimeSet() and the individual Axis::EStopTimeSet() values will be ignored.
Part of the Action method group.
- Sample Code:
- RapidSetup:
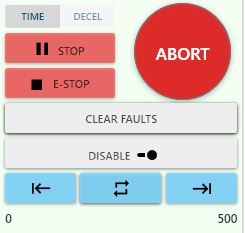
- Go to axis screen->Position and Trajectory box. Various actions (Stop, EStop, Abort) are shown in image below.
- See also
- ClearFaults, EStopTimeSet, EStopTimeGet, RSIState