- Description:
- ErrorLimitActionSet sets the action that will occur when the Error Limit Event triggers.
- Parameters
-
| action | Action taken on Error Limit trigger. A RSIAction value. |
- Note:
- Available Actions are Abort(), EStop(), Stop(), None, EStopAbort(), and EStopModify()
Part of the Limits and Action Configuration method group.
- Sample Code:
- Axis: Configuration
axis = controller.
AxisGet(axisNumber);
const double positionToleranceMax = Double.MaxValue / 10.0;
- RapidSetup:
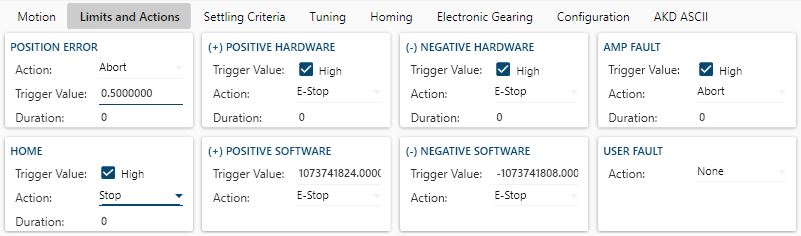
- Go to axis screen->Limits & Actions. In image below, ErrorLimitActionSet sets the action type shown in the Position Error box. It is currently set to ABORT.
- Note
- Position Error = Command Position - Actual Position
- For safety reasons, you may want to set this to ABORT event.
- See also
- ErrorLimitActionGet
- Examples
- HelperFunctionsCpp.h, Homing.cs, MathBlock.cs, MultiAxisMotion.cs, MultiaxisMotion.cpp, PVTmotionMultiAxis.cpp, PathMotion.cpp, SingleAxisSyncOutputs.cpp, SyncOutputWithMotion.cpp, and UpdateBufferPoints.cpp.