Set the Command and Actual positions.
- Description:
- PositionSet will set the value of axis' command and actual position. It also sets the origin position = (actualPos + originPos - x). This is the same method used for the "Zero Position" button in RapidSetup.
- Parameters
-
- Sample Code:
-
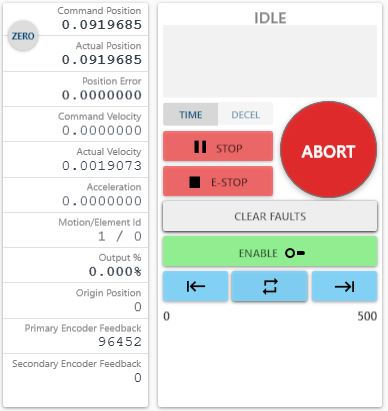
- RapidSetup:
- Go to axis screen. In the image below, the "Zero Position" button is the same as calling PositionSet(0).
- Note
- This is the most useful and safe "PositionSet" method. This will void any Axis homing and set the HomeState to FALSE. You cannot set the position when the state is MOVING, STOPPING or STOPPED.
- Examples
- AbsoluteMotion.cpp, AbsoluteMotion.cs, Camming.cpp, Camming.cs, FeedRate.cpp, FeedRate.cs, FinalVelocity.cpp, FinalVelocity.cs, Gearing.cpp, Gearing.cs, MotionHoldReleasedByDigitalInput.cpp, MotionHoldReleasedByDigitalInput.cs, MotionHoldReleasedByPosition.cpp, MotionHoldReleasedByPosition.cs, MotionHoldReleasedBySoftwareAddress.cpp, MotionHoldReleasedBySoftwareAddress.cs, PointToPointMultiaxisMotion.cpp, PointToPointMultiaxisMotion.cs, PTmotion.cpp, PTmotion.cs, PTmotionWhileStopping.cpp, PTmotionWhileStopping.cs, PVAJTmotion.cs, PVTmotion.cpp, PVTmotion.cs, PVTmotionMultiAxis.cpp, RelativeMotion.cs, SCurveMotion.cpp, SCurveMotion.cs, SetUserUnits.cpp, SetUserUnits.cs, SingleAxisSyncOutputs.cpp, SingleAxisSyncOutputs.cs, SyncOutputWithMotion.cpp, UpdateBufferPoints.cpp, UserLimitDigitalInputEStopStorePosition.cs, UserLimitGainChangeBasedOnPosition.cpp, UserLimitPositionOneCondition.cpp, UserLimitPositionOneCondition.cs, VelocitySetByAnalogInputValue.cpp, and VelocitySetByAnalogInputValue.cs.