◆ Abort()
Abort an axis.
- Description:
- Abort will disable and zero the filter output, and disable the Amp Enable output. The axis will be left in an error state (RSIStateERROR). ClearFaults() and AmpEnableSet() are mandatory before new motion commands can be executed.
- Sample Code:
- RapidSetup:
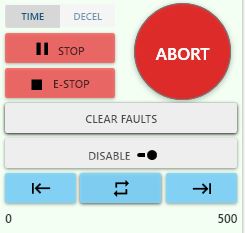
- Go to axis screen->Position and Trajectory box. Various actions (Stop, EStop, Abort) are shown in image below.
- See also
- ClearFaults, Stop, EStop, AmpEnableSet
- Examples
- AbsoluteMotion.cpp, AbsoluteMotion.cs, Camming.cpp, Camming.cs, Compensator1D.cs, Compensator2D.cs, CompensatorSingleAxis.cs, CustomEtherCATHome.cpp, CustomHome.cpp, FeedRate.cpp, FeedRate.cs, FinalVelocity.cpp, FinalVelocity.cs, Gantry.cpp, Gearing.cpp, Gearing.cs, HomeToNegativeLimit.cpp, HomeToNegativeLimit.cs, HomingWithAKDdrive.cpp, HomingWithAKDdrive.cs, HomingWithDS402drive.cs, MotionHoldReleasedByDigitalInput.cpp, MotionHoldReleasedByDigitalInput.cs, MotionHoldReleasedByPosition.cpp, MotionHoldReleasedByPosition.cs, MotionHoldReleasedBySoftwareAddress.cpp, MotionHoldReleasedBySoftwareAddress.cs, MultiAxisVelocityMotion.cs, PointToPointMultiaxisMotion.cpp, PointToPointMultiaxisMotion.cs, PTmotion.cpp, PTmotion.cs, PTmotionWhileStopping.cpp, PTmotionWhileStopping.cs, PVAJTmotion.cs, PVTmotion.cpp, PVTmotion.cs, PVTmotionMultiAxis.cpp, RelativeMotion.cpp, RelativeMotion.cs, SCurveMotion.cpp, SCurveMotion.cs, SingleAxisSyncOutputs.cpp, SingleAxisSyncOutputs.cs, SyncOutputWithMotion.cpp, UpdateBufferPoints.cpp, UserLimitDigitalInputEStopStorePosition.cs, UserLimitPositionOneCondition.cpp, UserLimitPositionOneCondition.cs, VelocitySetByAnalogInputValue.cpp, and VelocitySetByAnalogInputValue.cs.